![]() Теория механизмов и машин
Теория механизмов и машин
Теория механизмов и машин (также — Теория машин и механизмов; ТММ) — это научная дисциплина об общих методах исследования, построения, кинематики и динамики механизмов и машин и о научных основах их проектирования.
![]()
![]() История развития дисциплины
История развития дисциплины![]() Править
Править
В качестве самостоятельной научной дисциплины ТММ, как и многие другие прикладные разделы механики, возникла на волне промышленной революции, начало которой относится к 30-м годам XVIII столетия, хотя машины создавались задолго до этого, и простые механизмы (колесо, винтовая передача и др.) широко использовались ещё во времена Древнего Египта.
Глубокий научный подход в теории механизмов и машин начал широко применяться с начала XIX века. Весь предшествующий период развития техники можно рассматривать как период эмпирического создания машин, на протяжении которого делались изобретения большого количества простых машин и механизмов, среди которых:
- грузоподъёмные машины;
- дробилки;
- ткацкие и токарные станки;
- насосы и др.


Теория механизмов и машин в своём развитии опиралась на важнейшие физические законы — закон сохранения энергии, законы Амонтона и Кулона для определения сил трения, золотое правило механики и др. В ТММ широко используются законы, теоремы и методы теоретической механики. Важное значение для данной дисциплины имеют: понятие передаточного отношения, основы теории эвольвентного зацепления и др.
Можно отметить роль, которую сыграли в создании предпосылок для развития ТММ следующие учёные: Архимед, Дж. Кардано, Леонардо да Винчи, Л. Эйлер, Д. Ватт, Г. Амонтон, Ш. Кулон.

Одним из основоположников теории механизмов и машин считается Пафнутий Чебышёв (1812—1894), который во второй половине XIX века опубликовал серию важнейших работ, посвящённых анализу и синтезу механизмов. Одно из его изобретений — механизм Чебышёва.

В XIX веке развиваются такие разделы, как кинематическая геометрия механизмов (Савари, Шаль, Оливье), кинетостатика (Г. Кориолис), классификация механизмов по функции преобразования движения (Г. Монж), решается задача расчёта маховика (Ж. В. Понселе) и др. Были написаны первые научные монографии по механике машин (Р. Виллис, А. Бориньи), читаются первые курсы лекций по ТММ, выходят первые учебники (А. Бетанкур, Д. С. Чижов, Ю. Вейсбах).
Во второй половине XIX столетия публикуются работы немецкого учёного Ф. Рёло, в которых вводятся важные понятия кинематической пары, кинематической цепи и кинематической схемы.
В советское время крупнейший вклад в становление теории механизмов и машин как отдельной дисциплины внес Артоболевский И. И. Им опубликован целый ряд фундаментальных и обобщающих работ.
В 1969 году он был инициатором создания Международной федерации по теории машин и механизмов (МФТоММ), насчитывающей 45 стран-участниц, несколько раз избирался её президентом.
![]()
![]() Основные понятия
Основные понятия![]() Править
Править
Машина — технический объект, состоящий из взаимосвязанных функциональных частей (узлов, устройств, механизмов и др.), предназначенный для получения или преобразования механической энергии с целью выполнения возложенных на него функций.
Механизм — система взаимосвязанных тел, предназначенных для преобразования движения одного или нескольких тел в требуемое движение других тел. Механизм составляет основу большинства машин.
Твёрдое тело, входящее в состав механизма, называется звеном. Звено — отдельная деталь, либо группа деталей, жёстко связанных между собой. Звено может состоять из одной или нескольких неподвижно соединённых деталей.
Соединение звеньев, допускающее их относительное движение, называется кинематической парой. Наиболее распространённые кинематические пары: цилиндрический шарнир; шаровой шарнир; ползун и направляющая; винтовая передача. На рисунках приведены условные трёхмерные обозначения типовых кинематических пар для построения пространственных кинематических схем механизмов согласно ISO 3952[1].

Цилиндрический шарнир
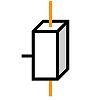
Ползун и направляющая

Винтовая пара

Сферический шарнир




При построении механизма звенья соединяются в кинематические цепи. Другими словами, механизм — это кинематическая цепь, в состав которой входит неподвижное звено (стойка или корпус (основание)), число степеней свободы которого равняется числу обобщённых координат, характеризующих положения звеньев относительно стойки. Движение звеньев рассматривается по отношению к неподвижному звену — стойке (корпусу, основанию).
![]()
![]() Задачи дисциплины
Задачи дисциплины![]() Править
Править
Теория механизмов и машин решает следующие задачи:
- анализ механизмов, то есть описание движения, кинематический и динамический анализ существующих и разрабатываемых механизмов;
- синтез механизмов, то есть проектирование структуры и геометрии механизмов на основе заданных кинематических и динамических характеристик;
- задачи теории машин-автоматов, рассматривающей вопросы построения схем автоматических машин, исходя из условий согласованной работы отдельных механизмов, и достижения оптимальной продуктивности, точности и надёжности машин-автоматов.
![]()
![]() Структура дисциплины
Структура дисциплины![]() Править
Править
- Структура механизмов и машин.
- Геометрия механизмов и их элементов.
- Динамика машин и механизмов.
![]()
![]() Современное состояние дисциплины
Современное состояние дисциплины![]() Править
Править
Широкое развитие систем автоматизированного проектирования на базе компьютерной техники позволило существенно снизить трудоемкость ранее применявшихся графических методов анализа и синтеза механизмов. Появилась возможность пространственной анимации виртуальных моделей механизмов. САПР позволяют также проводить проверку на пространственную совместимость звеньев в сложных механизмах, что было весьма затруднительно ранее без изготовления моделей.
Рост вычислительных мощностей позволил отказаться от ранее применявшихся вынужденных упрощений в методиках расчетов.
Широкое распространение получила параметризация моделей, когда, например, геометрические размеры звеньев могут быть изменены на любом этапе проектирования с пересчетом результатов.
![]()
![]() Примечания
Примечания![]() Править
Править
↑
ISO 3952 Kinematic diagrams — Graphical symbols
![]()
![]() Литература
Литература![]() Править
Править
- Артоболевский И. И. Теория машин и механизмов. М. Наука 1988.
- Носко П. Л., Филь П. В., Манько Н. В., Шисман В. Е. Тексты лекций по дисциплине «Теория механизмов и машин» для студентов заочной формы обучения. — Луганск: Издательство ВУНУ им. В. Даля, 2002. — 122 с.
- Теория машин и механизмов
Машин и механизмов теория // Большая советская энциклопедия :
[в 30 т.] / гл. ред.
А. М. Прохоров. — 3-е изд. — М. : Советская энциклопедия, 1969—1978. — статья в Большой Советской Энциклопедии
- Заблонский К. И. и др. Теория механизмов и машин. — Киев.: Выша школа, 1989.
- Фролов М. М. Детали машин
![]()
![]() Ссылки
Ссылки![]() Править
Править
- Теория механизмов и машин — Электронный журнал
- Cornell university — Straight-line mechanism models
- Cornell university — «How to Draw a Straight Line» — tutorial by Daina Taimina
- Simulations using the Molecular Workbench software
- Лекции по Сопротивлению материалов, Теории упругости, Теоретической механике, Прикладной механике, Деталям машин, Теории машин и механизмов