![]() ASV 84
ASV 84
ASV 84 (аббр. Adaptive Suspension Vehicle 1984 — «машина с адаптивной подвеской») — американская опытная многоцелевая машина военного предназначения на шагающей подвижной платформе, также известная как «ходячий танк» (walking tank).[1] Машина была разработана в лабораториях Университета штата Огайо в Колумбусе под руководством Роберта Макги и Кеннета Уолдрона по заказу Агентства по перспективным научно-исследовательским разработкам США (ДАРПА).[2]
| ASV 84 | |
|---|---|
| OSU 2,5-ton Adaptive Suspension Vehicle | |
| Классификация | машина повышенной проходимости |
| Боевая масса, т | 2,5 |
| Компоновочная схема | шагающая |
| Экипаж, чел. | 1 (оператор) |
| История | |
| Основные операторы |
|
![]()
![]() Подоплёка
Подоплёка![]() Править
Править
Проект разработки «ходячего танка» пришёлся на период объявления Президентом США Рональдом Рейганом программы Стратегической оборонной инициативы («Звёздных войн»), поэтому когда в июле—августе 1983 года Университет штата Огайо получил контракт на разработку указанной боевой машины, в журнале «Нью сайентист» этот эпизод прокомментировали в шутку, что военное командование насмотрелось фильмов из цикла «Звёздные войны».[1]
![]()
![]() Техническое задание
Техническое задание![]() Править
Править
Контракт с университетом заключило ДАРПА, по его условиям от подрядчика требовалось изготовить управляемый оператором из отделения управления двухтонный танк на шести опорных конечностях и представить его на госиспытания к лету 1984 года. Официально данный образец военной техники именовался «машиной с адаптивной подвеской». Основанием для вложения бюджетных средств была всё та же проблема повышения проходимости сухопутной техники, поскольку в агентстве настаивали на том, что половина земной поверхности принципиально непроходима для колёсной и гусеничной техники. Тем временем, ряд европейских компаний наладил выпуск промышленных шагоходов для лесозаготовительной и горнодобывающей отраслей промышленности. Но промышленные шагоходы отличались малой скоростью и неповоротливостью, обусловленными необходимостью переставления последовательно каждой их конечности оператором, а от научных работников в Колумбусе требовалось создать быстроходную машину, способную передвигаться бегом и не создававшую нагрузок на вестибулярный аппарат оператора, как все предыдущее опытные машины такого типа. В лабораториях университета спроектировали, изготовили и испытали на территории университетского кампуса опытный образец размером меньше требуемого заказчиком (для проверки работоспособности концепта).[1] Первые испытания были назначены на конец 1984 года[2].
![]()
![]() Описание
Описание![]() Править
Править
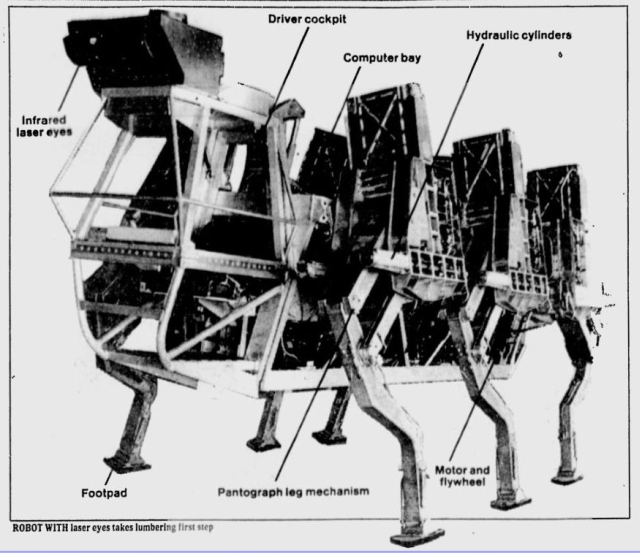
Опытный прототип машины передвигался в автоматическом режиме, то есть в отличие от всех предыдущих образцов шагоходов, где от оператора требовалось физическое усилие руками или ногами, передающееся за счёт гидроусилителей на опорные конечности машины, в «ходячем танке» оператору было достаточно вести машину, как обыкновенный автомобиль. Адаптивная способность подвески достигается за счёт «оптического радара» — лазерной дальномерной системы, непрерывно сканирующей переднюю полусферу и измеряющей расстояние до окружающих предметов. На основе сделанных замеров бортовой компьютер анализирует наиболее оптимальные места на твёрдом грунте для постановки конечностей, избегая ямы, валуны, деревья и прочие элементы местности, и формируя траекторию движения машины с наименьшим расходом энергии на каждое движение. Инерциальная навигационная система удерживает машину на избранной траектории и обеспечивает стабилизацию тела машины (внутри которого расположены отделение управление и моторно-трансмиссионное отделение) в вертикальной и горизонтальной плоскости, оберегая его от чрезмерных колебаний из стороны в сторону, вверх и вниз, придавая телу машины устойчивое положение в пространстве в движении несмотря на изменение рельефа местности и наклона движения. Логический аппарат с базовыми логическими вентилями, а также искусственным интеллектом, позволяющим машине идентифицировать и самостоятельно обходить или переступать искусственные препятствия, инженерные заграждения, растяжки и т. д. Электроника машины была построена на 16-битных микропроцессорах для упрощения работы оператора и снижения квалификационных требований к управлению машиной. Система гидравлики приводов конечностей с насосами переменного объёма. В качестве двигателя использовался мотоциклетный двигатель Kawasaki[1]. Масса исходной модели составляла 2,5 тонны при длине конечностей около 183 см[2].
![]()
![]() Дальнейшее развитие задела
Дальнейшее развитие задела![]() Править
Править
 Внешние изображения
Внешние изображения
{kind=link}
{kind=link}
{kind=link}
{kind=link}
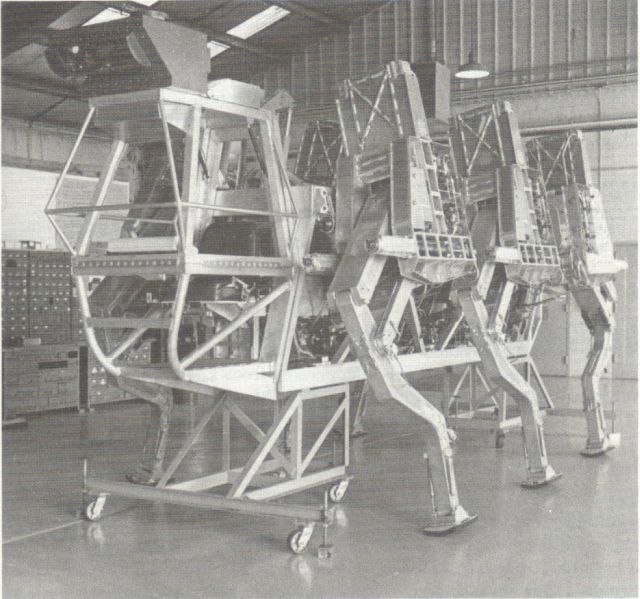
Работы над ASV плавно перетекли в создание нового прототипа шагающей машины, внешне отличавшейся от ASV 84, но позаимствовавшей у неё многие конструктивные решения. 27 июня 1985 года в прессе вышла публикация об испытаниях прототипа с фотографией, в публикации сообщалось, что собственный вес машины составляет 3,5 тонны (на одну тонну больше ASV 84), а грузоподъёмность до 5,44 тонн[3]. В ходе пресс-конференции разработчиками машины были оглашены некоторые технические характеристики: Опытный прототип был 518 см в длину, 244 см в ширину и 320 см в высоту, корпус и конечности были выполнены из лёгкого алюминиевого сплава, бортовая электроника включала в себя шестнадцать компьютеров. На местности машина развивала скорость до 12,8 км/ч, крейсерская скорость составляла 8 км/ч. Ходовые качества позволяли машине преодолевать траншею шириной 274 см и стенку высотой до 213 см[4]. В модифицированном виде машина по-прежнему предназначалась для военных нужд[5]. Созданная машина получила широкое освещение в мировой прессе[6].
![]()
![]() Примечания
Примечания![]() Править
Править
↑ 1 2 3 4
Enter the walking tank. // New Scientist. — 4 August 1983. — Vol. 99 — No. 1369 — P. 348.
↑ 1 2 3
Britton, Peter. Engineering the new breed of walking machines. // Popular Science. — September 1984. — Vol. 225 — No. 3 — P. 69 — ISSN 0161-7370.
↑
OSU’s adaptive suspension vehicle debuts Архивная копия от 28 июля 2017 на Wayback Machine. — June 27, 1985. — P. 1.
↑
Sodelka, Regina. Machine steps out Архивная копия от 28 июля 2017 на Wayback Machine. // The Ohio State Lantern. — July 3, 1985. — P. 3.
↑
Demana, Mike. OSU researchers test walking war vehicle Архивная копия от 28 июля 2017 на Wayback Machine. // The Ohio State Lantern. — December 4, 1985. — P. 3.
↑
Walkin’, yes indeed Архивная копия от 28 июля 2017 на Wayback Machine. // Ohio State University on Campus. — November 21, 1985. — P. 5.
![]()
![]() Литература
Литература![]() Править
Править
- Song, Shin-Min ; Waldron, Kenneth J. Machines That Walk: The Adaptive Suspension Vehicle. — Cambridge, Mass.: MIT Press, 1989. — 314 p. — (MIT Press series in artificial intelligence) — ISBN 0-262-19274-8.